Data Acquisition
Photogrammetry
I have experimented very much with photogrammetry and got exciting results. This article talks about this experience. These experiments were done together with Andalú Sea and my...
Filter by Category
Filter by Author

I have experimented very much with photogrammetry and got exciting results. This article talks about this experience. These experiments were done together with Andalú Sea and my...

In my last post, “Alioli ROV Boards“, I described most of the hardware I use to build Alioli ROV and how I plan to use it. In this post, I show how the UAV submarine...

In my last post, “Get your hardware for Arduino Underwater ROV”, I described most of the hardware I use to build Alioli ROV and how I plan to use it. In this post, I...
In my last post, “Finishing the frame for an Underwater ROV”, I gave all details about the design I used to build the frame for Alioli Underwater ROV. In this post, I...

In my last post, “How I designed the frame for my Underwater ROV“, I gave all details about the design I used for the frame for Alioli Underwater ROV. In this post, I...

In my last post, “Underwater Alioli ROV“, I shared all the information I got from the Internet to build my Underwater ROV. In this post, I will explain how I made the...

This time I have decided to write this article in English because I have been able to get a lot of information. Thanks to that, most of the information I found to help me with...

🇬🇧 Read it in English, “GenCreate, GenUpdate, GenDetail and GenDelete“ En el último artículo describíamos Codenerix GenList para comenzar a usar los listados de CODENERIX. Ha...
🇬🇧 Read it in English, “GenList“ Anteriormente hablábamos sobre CodenerixModel para entender como se construye un modelo funcional con CODENERIX. Sin embargo, para que...

🇬🇧 Read it in English, “CodenerixModel“ En el artículo anterior hablábamos sobre CODENERIX y sus bondades. Ahora vamos a comenzar una serie de artículos que permitan...

I have experimented very much with photogrammetry and got exciting results. This article talks about this experience. These experiments were done together with Andalú Sea and my friend Juan Soler.
During underwater operations, we always record videos of the whole process just in case of problems and for documentation purposes. We checked a sewage outfall for structural stability and broken parts during this operation. You can watch this piece of the video:
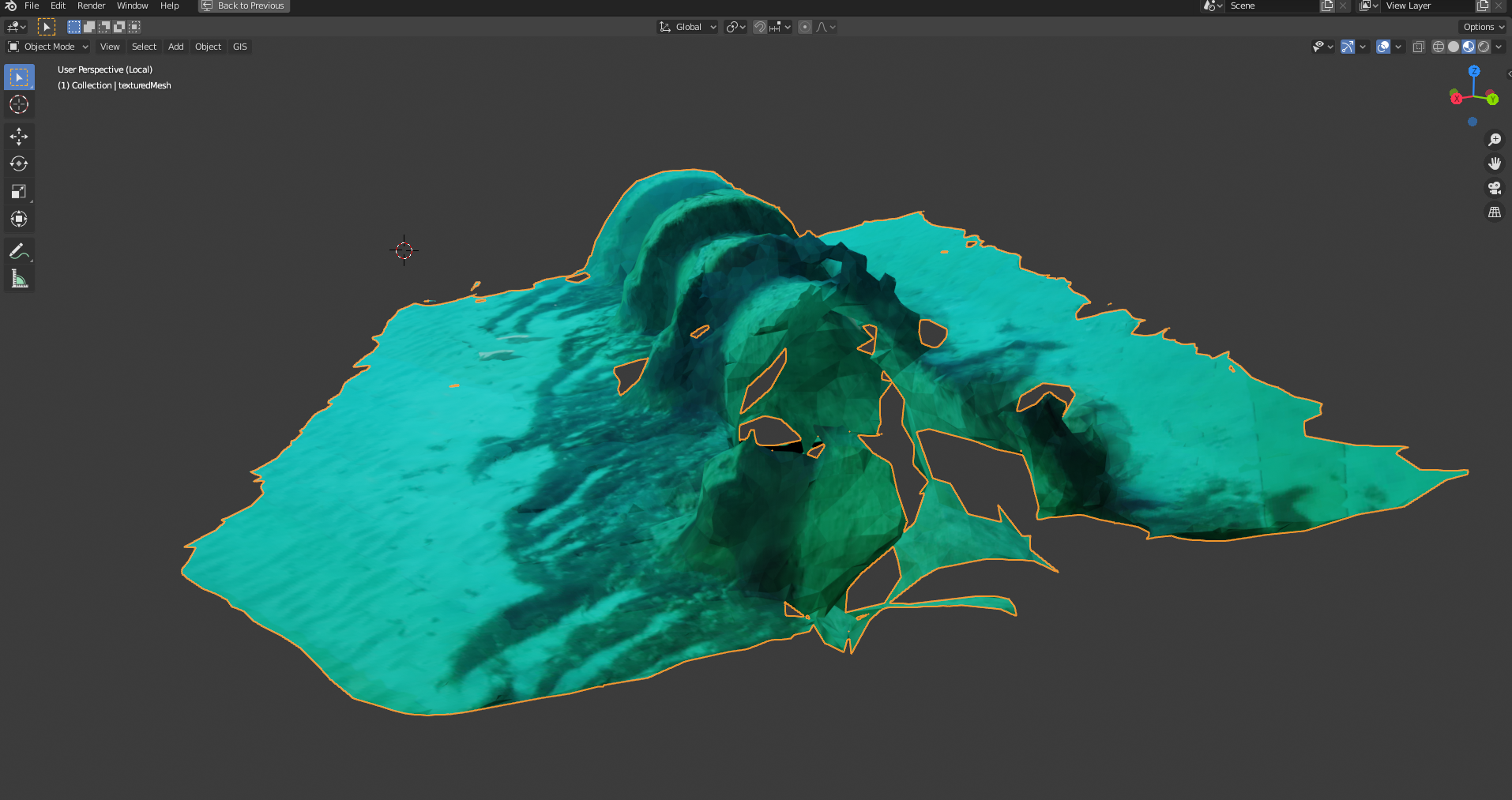
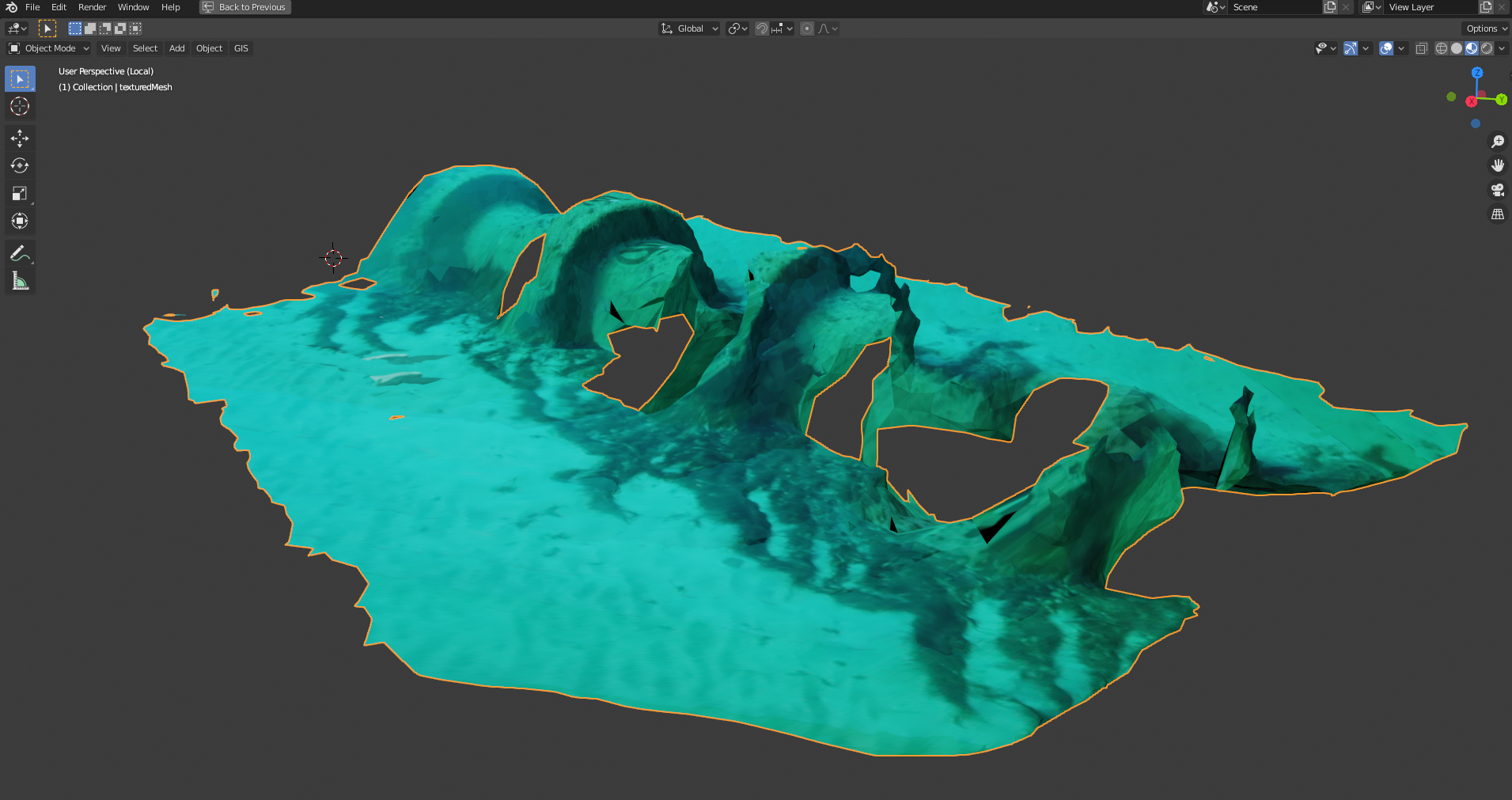
After experimenting with photogrammetry, and thanks to my previous experience with Blender, I rendered the following images:

And here is the final video:
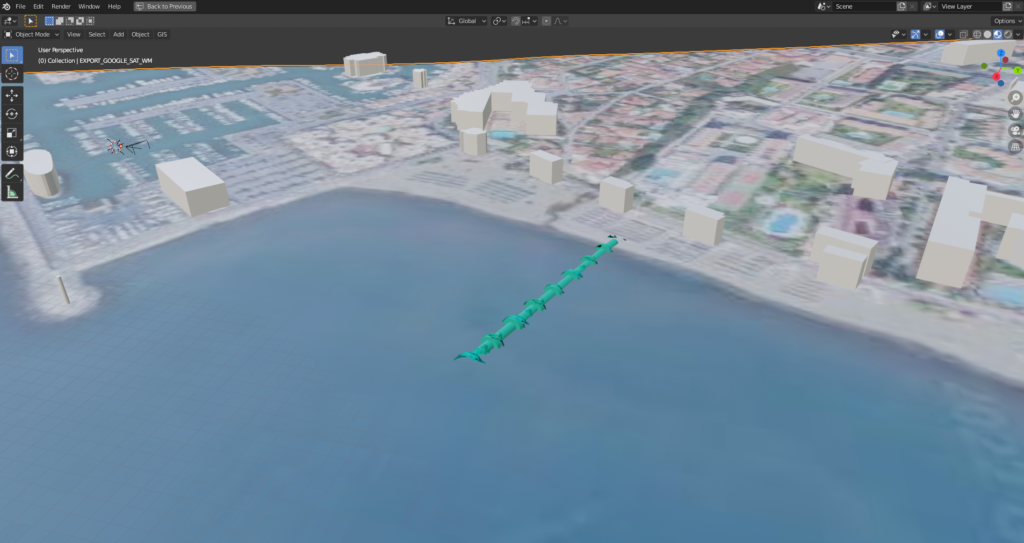
I also positioned the sewage outfall on Google Maps using BlenderGIS:
Other examples of photogrammetry I did:

The results with fish eye capture affected the results very much.

You can see how the entire structure blends on borders, and the dimensions are unrealistic:

It is hard work to get suitable photogrammetry renders from a real object, but with time and computing power, it is possible to get it ready.